C++20協程的使用方法
這篇文章主要介紹“C++20協程的使用方法”,在日常操作中,相信很多人在C++20協程的使用方法問題上存在疑惑,小編查閱了各式資料,整理出簡單好用的操作方法,希望對大家解答”C++20協程的使用方法”的疑惑有所幫助!接下來,請跟著小編一起來學習吧!
創新互聯公司專注于企業全網整合營銷推廣、網站重做改版、白云鄂網站定制設計、自適應品牌網站建設、成都h5網站建設、成都做商城網站、集團公司官網建設、成都外貿網站建設、高端網站制作、響應式網頁設計等建站業務,價格優惠性價比高,為白云鄂等各大城市提供網站開發制作服務。
摘要:事件驅動(event driven)是一種常見的代碼模型,其通常會有一個主循環(mainloop)不斷的從隊列中接收事件,然后分發給相應的函數/模塊處理。常見使用事件驅動模型的軟件包括圖形用戶界面(GUI),嵌入式設備軟件,網絡服務端等。
嵌入式事件驅動代碼的難題
事件驅動(event driven)是一種常見的代碼模型,其通常會有一個主循環(mainloop)不斷的從隊列中接收事件,然后分發給相應的函數/模塊處理。常見使用事件驅動模型的軟件包括圖形用戶界面(GUI),嵌入式設備軟件,網絡服務端等。
本文以一個高度簡化的嵌入式處理模塊做為事件驅動代碼的例子:假設該模塊需要處理用戶命令、外部消息、告警等各種事件,并在主循環中進行分發,那么示例代碼如下:
#include <iostream>
#include <vector>
enum class EventType {
COMMAND,
MESSAGE,
ALARM
};
// 僅用于模擬接收的事件序列
std::vector<EventType> g_events{EventType::MESSAGE, EventType::COMMAND, EventType::MESSAGE};
void ProcessCmd()
{
std::cout << "Processing Command" << std::endl;
}
void ProcessMsg()
{
std::cout << "Processing Message" << std::endl;
}
void ProcessAlm()
{
std::cout << "Processing Alarm" << std::endl;
}
int main()
{
for (auto event : g_events) {
switch (event) {
case EventType::COMMAND:
ProcessCmd();
break;
case EventType::MESSAGE:
ProcessMsg();
break;
case EventType::ALARM:
ProcessAlm();
break;
}
}
return 0;
}這只是一個極簡的模型示例,真實的代碼要遠比它復雜得多,可能還會包含:從特定接口獲取事件,解析不同的事件類型,使用表驅動方法進行分發……不過這些和本文關系不大,可暫時先忽略。
用順序圖表示這個模型,大體上是這樣:
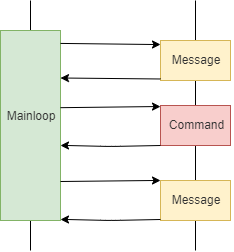
在實際項目中,常常碰到的一個問題是:有些事件的處理時間很長,比如某個命令可能需要批量的進行上千次硬件操作:
void ProcessCmd()
{
for (int i{0}; i < 1000; ++i) {
// 操作硬件接口……
}
}這種事件處理函數會長時間的阻塞主循環,導致其他事件一直排隊等待。如果所有事件對響應速度都沒有要求,那也不會造成問題。但是實際場景中經常會有些事件是需要及時響應的,比如某些告警事件出現后,需要很快的執行業務倒換,否則就會給用戶造成損失。這個時候,處理時間很長的事件就會產生問題。
有人會想到額外增加一個線程專用于處理高優先級事件,實踐中這確實是個常用方法。然而在嵌入式系統中,事件處理函數會讀寫很多公共數據結構,還會操作硬件接口,如果并發調用,極容易導致各類數據競爭和硬件操作沖突,而且這些問題常常很難定位和解決。那在多線程的基礎上加鎖呢?——設計哪些鎖,加在哪些地方,也是非常燒腦而且容易出錯的工作,如果互斥等待過多,還會影響性能,甚至出現死鎖等麻煩的問題。
另一種解決方案是:把處理時間很長的任務切割成很多個小任務,并重新加入到事件隊列中。這樣就不會長時間的阻塞主循環。這個方案避免了并發編程產生的各種頭疼問題,但是卻帶來另一個難題:如何把一個大流程切割成很多獨立小流程?在編碼時,這需要程序員解析函數流程的所有上下文信息,設計數據結構單獨存儲,并建立關聯這些數據結構的特殊事件。這往往會帶來幾倍的額外代碼量和工作量。
這個問題幾乎在所有事件驅動型軟件中都會存在,但在嵌入式軟件中尤為突出。這是因為嵌入式環境下的CPU、線程等資源受限,而實時性要求高,并發編程受限。
C++20語言給這個問題提供了一種新的解決方案:協程。
C++20的協程簡介
關于協程(coroutine)是什么,在wikipedia[1]等資料中有很好的介紹,本文就不贅述了。在C++20中,協程的關鍵字只是語法糖:編譯器會將函數執行的上下文(包括局部變量等)打包成一個對象,并讓未執行完的函數先返回給調用者。之后,調用者使用這個對象,可以讓函數從原來的“斷點”處繼續往下執行。
使用協程,編碼時就不再需要費心費力的去把函數“切割”成多個小任務,只用按照習慣的流程寫函數內部代碼,并在允許暫時中斷執行的地方加上co_yield語句,編譯器就可以將該函數處理為可“分段執行”。
協程用起來的感覺有點像線程切換,因為函數的棧幀(stack frame)被編譯器保存成了對象,可以隨時恢復出來接著往下運行。但是實際執行時,協程其實還是單線程順序運行的,并沒有物理線程切換,一切都只是編譯器的“魔法”。所以用協程可以完全避免多線程切換的性能開銷以及資源占用,也不用擔心數據競爭等問題。
可惜的是,C++20標準只提供了協程基礎機制,并未提供真正實用的協程庫(在C++23中可能會改善)。目前要用協程寫實際業務的話,可以借助開源庫,比如著名的cppcoro[2]。然而對于本文所述的場景,cppcoro也沒有直接提供對應的工具(generator經過適當的包裝可以解決這個問題,但是不太直觀),因此我自己寫了一個切割任務的協程工具類用于示例。
自定義的協程工具
下面是我寫的SegmentedTask工具類的代碼。這段代碼看起來相當復雜,但是它作為可重用的工具存在,沒有必要讓程序員都理解它的內部實現,一般只要知道它怎么用就行了。SegmentedTask的使用很容易:它只有3個對外接口:Resume、IsFinished和GetReturnValue,其功能可根據接口名字自解釋。
#include <optional>
#include <coroutine>
template<typename T>
class SegmentedTask {
public:
struct promise_type {
SegmentedTask<T> get_return_object()
{
return SegmentedTask{Handle::from_promise(*this)};
}
static std::suspend_never initial_suspend() noexcept { return {}; }
static std::suspend_always final_suspend() noexcept { return {}; }
std::suspend_always yield_value(std::nullopt_t) noexcept { return {}; }
std::suspend_never return_value(T value) noexcept
{
returnValue = value;
return {};
}
static void unhandled_exception() { throw; }
std::optional<T> returnValue;
};
using Handle = std::coroutine_handle<promise_type>;
explicit SegmentedTask(const Handle coroutine) : coroutine{coroutine} {}
~SegmentedTask()
{
if (coroutine) {
coroutine.destroy();
}
}
SegmentedTask(const SegmentedTask&) = delete;
SegmentedTask& operator=(const SegmentedTask&) = delete;
SegmentedTask(SegmentedTask&& other) noexcept : coroutine(other.coroutine) { other.coroutine = {}; }
SegmentedTask& operator=(SegmentedTask&& other) noexcept
{
if (this != &other) {
if (coroutine) {
coroutine.destroy();
}
coroutine = other.coroutine;
other.coroutine = {};
}
return *this;
}
void Resume() const { coroutine.resume(); }
bool IsFinished() const { return coroutine.promise().returnValue.has_value(); }
T GetReturnValue() const { return coroutine.promise().returnValue.value(); }
private:
Handle coroutine;
};自己編寫協程的工具類不光需要深入了解C++協程機制,而且很容易產生懸空引用等未定義行為。因此強烈建議項目組統一使用編寫好的協程類。如果讀者想深入學習協程工具的編寫方法,可以參考Rainer Grimm的博客文章[3]。
接下來,我們使用SegmentedTask來改造前面的事件處理代碼。當一個C++函數中使用了co_await、co_yield、co_return中的任何一個關鍵字時,這個函數就變成了協程,其返回值也會變成對應的協程工具類。在示例代碼中,需要內層函數提前返回時,使用的是co_yield。但是C++20的co_yield后必須跟隨一個表達式,這個表達式在示例場景下并沒必要,就用了std::nullopt讓其能編譯通過。實際業務環境下,co_yield可以返回一個數字或者對象用于表示當前任務執行的進度,方便外層查詢。
協程不能使用普通return語句,必須使用co_return來返回值,而且其返回類型也不直接等同于co_return后面的表達式類型。
enum class EventType {
COMMAND,
MESSAGE,
ALARM
};
std::vector<EventType> g_events{EventType::COMMAND, EventType::ALARM};
std::optional<SegmentedTask<int>> suspended; // 沒有執行完的任務保存在這里
SegmentedTask<int> ProcessCmd()
{
for (int i{0}; i < 10; ++i) {
std::cout << "Processing step " << i << std::endl;
co_yield std::nullopt;
}
co_return 0;
}
void ProcessMsg()
{
std::cout << "Processing Message" << std::endl;
}
void ProcessAlm()
{
std::cout << "Processing Alarm" << std::endl;
}
int main()
{
for (auto event : g_events) {
switch (event) {
case EventType::COMMAND:
suspended = ProcessCmd();
break;
case EventType::MESSAGE:
ProcessMsg();
break;
case EventType::ALARM:
ProcessAlm();
break;
}
}
while (suspended.has_value() && !suspended->IsFinished()) {
suspended->Resume();
}
if (suspended.has_value()) {
std::cout << "Final return: " << suspended->GetReturnValue() << endl;
}
return 0;
}出于讓示例簡單的目的,事件隊列中只放入了一個COMMAND和一個ALARM,COMMAND是可以分段執行的協程,執行完第一段后,主循環會優先執行隊列中剩下的事件,最后再來繼續執行COMMAND余下的部分。實際場景下,可根據需要靈活選擇各種調度策略,比如專門用一個隊列存放所有未執行完的分段任務,并在空閑時依次執行。
本文中的代碼使用gcc 10.3版本編譯運行,編譯時需要同時加上-std=c++20和-fcoroutines兩個參數才能支持協程。代碼運行結果如下:
Processing step 0 Processing Alarm Processing step 1 Processing step 2 Processing step 3 Processing step 4 Processing step 5 Processing step 6 Processing step 7 Processing step 8 Processing step 9 Final return: 0
可以看到ProcessCmd函數(協程)的for循環語句并沒有一次執行完,在中間插入了ProcessAlm的執行。如果分析運行線程還會發現,整個過程中并沒有物理線程的切換,所有代碼都是在同一個線程上順序執行的。
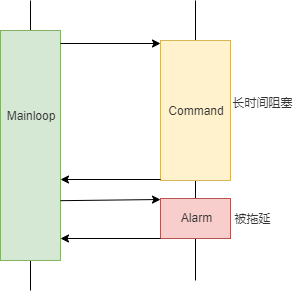
使用了協程的順序圖變成了這樣:
.jpg)
事件處理函數的執行時間長不再是問題,因為可以中途“插入”其他的函數運行,之后再返回斷點繼續向下運行。
總結
一個較普遍的認識誤區是:使用多線程可以提升軟件性能。但事實上,只要CPU沒有空跑,那么當物理線程數超過了CPU核數,就不再會提升性能,相反還會由于線程的切換開銷而降低性能。大多數開發實踐中,并發編程的主要好處并非為了提升性能,而是為了編碼的方便,因為現實中的場景模型很多都是并發的,容易直接對應成多線程代碼。
協程可以像多線程那樣方便直觀的編碼,但是同時又沒有物理線程的開銷,更沒有互斥、同步等并發編程中令人頭大的設計負擔,在嵌入式應用等很多場景下,常常是比物理線程更好的選擇。
相信隨著C++20的逐步普及,協程將來會得到越來越廣泛的使用。
到此,關于“C++20協程的使用方法”的學習就結束了,希望能夠解決大家的疑惑。理論與實踐的搭配能更好的幫助大家學習,快去試試吧!若想繼續學習更多相關知識,請繼續關注創新互聯網站,小編會繼續努力為大家帶來更多實用的文章!
本文標題:C++20協程的使用方法
分享鏈接:http://m.newbst.com/article22/ggpejc.html
成都網站建設公司_創新互聯,為您提供ChatGPT、企業網站制作、手機網站建設、電子商務、外貿網站建設、網站內鏈
聲明:本網站發布的內容(圖片、視頻和文字)以用戶投稿、用戶轉載內容為主,如果涉及侵權請盡快告知,我們將會在第一時間刪除。文章觀點不代表本網站立場,如需處理請聯系客服。電話:028-86922220;郵箱:631063699@qq.com。內容未經允許不得轉載,或轉載時需注明來源: 創新互聯

- TQC + Dreamweaver CS4 網站設計認證研習會 2013-08-08
- 動漫類網站設計特點有哪些 2016-03-06
- 什么才真正是網站制作中的網站策劃? 2016-11-06
- 為什么網站設計很重要 2022-08-16
- 七大毀掉網站設計的因素 2022-07-21
- 網站設計如何做到“大氣”符合潮流的設計 2021-10-24
- 網建界的“洗剪吹”獨特個性網站設計之關于我們 2022-11-25
- 十個簡約時尚風格網站設計賞析 2021-01-29
- 【成都網站建設】極簡主義的網站設計需要哪些元從來調配 2022-10-01
- 網站設計色彩效應 2021-06-05
- 設計對于移動端網站排名優化的重要性是什么 2016-08-31
- 營銷網站設計的一些訣竅 2022-10-19